
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
- 아르바이트추천
- 블로그기자단
- 이마트스태프
- 온라인교육기부
- 과학기술정보통신부
- 알바추천
- 과기부
- 쏙쏙캠프
- 대외활동추천
- 면접 후기
- 과학기술정보통신부 블로그기자단
- 대외활동
- 신세계알바
- 대학생알바추천
- 서류합격
- 이마트알바
- 과학기술정보통신부블로그기자단
- 이마트스태프후기
- 이마트면접
- 블로그 기자단
- 이마트계약직
- 수원구운초등학교
- 이마트알바후기
- 태봉초등학교
- Today
- Total
Yun Seong Hyeon
[블로그 기사 제출본] 지하자원을 탐사하는 두더지 로봇 '몰봇' 본문

지하자원을 탐사하는 두더지 로봇 '몰봇'
우리가 살고 있는 지구는 땅속에 수많은 지하자원을 품고 있습니다. 하지만 지금껏 유용하게 사용되어온 자원들이 대부분 고갈되어 가고 있어 이를 대체할 새로운 에너지원 탐사에 수십 년 전부터 전 세계의 이목이 집중되고 있습니다.
이러한 지하자원을 찾아 시료를 채취하기 위해선 천부 굴착 작업이라는 과정을 거쳐야 하는데 천부 굴착 작업은 시추기와 파이프라인, 펌프 등의 각종 중장비를 조합해 작업을 진행해야 하는 복잡함이 있고, 시추 작업에 사용되는 유체로 인해 환경오염의 문제가 있습니다.
이에 지난 4일, 한국과학기술원(KAIST) 전기 및 전자공학부 명현 교수 연구팀은 숨겨진 지하자원을 탐사할 수 있는 두더지 모양의 `몰봇(Mole-bot)'을 개발했다고 밝혔습니다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체하는 새로운 에너지인 탄층 메탄가스나 전자기기에 이용되는 희토류 등이 매설된 지역을 탐사하고 우주 행성의 표면과 같은 극한의 환경에서 표본 채취를 목적으로 개발된 생체 모방형 로봇으로 지름 25cm, 길이 84cm, 무게 26kg으로 비교적 작은 사이즈로 만들어져 공사 규모는 이전보다 월등히 작아지지만, 기존의 어렵고 복잡했던 공정, 환경 오염 유발 등의 많은 문제점을 해결할 수 있을 것으로 기대되고 있습니다.
그래서 지금부터 이 몰봇이 무엇인지 알아보고자 합니다.
| 두더지 로봇 '몰봇'은 어떻게 땅 속을 파고 들어갈 수 있을까요? |
작지만 강한 로봇 몰봇, 몰봇이 어떠한 방식으로 동작하는지 구조부터 살펴보겠습니다.
몰봇(Mole-bot)은 크게 땅을 파는 드릴링부, 땅을 파내며 나온 잔해를 제거하는 잔해제거부, 방향 전환의 역할을 하는 허리부로 구성되며 이외에는 이동을 담당하는 이동부와 고정을 담당하는 고정부로 이루어져 있습니다.
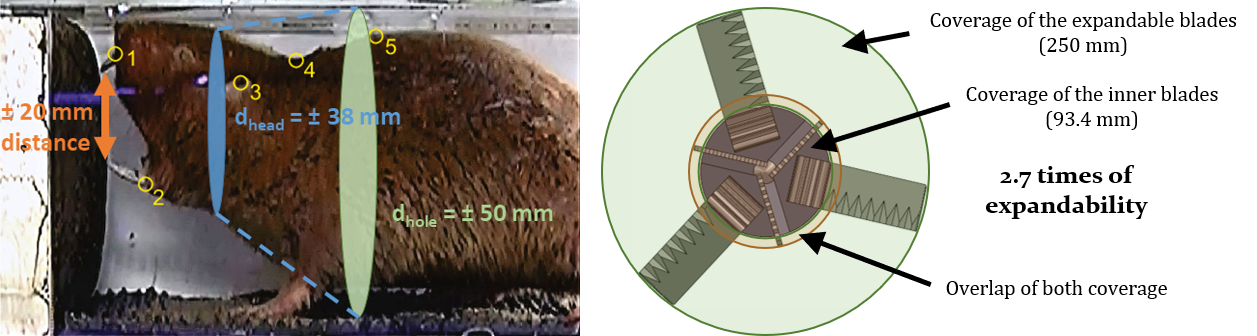
드릴링 부에서는 이빨로 토양을 긁어내어 땅을 파고 들어가는 두더지 종 중 하나인 `치젤 투스(Chisel tooth mole)'를 생체 모방하여 더 진화된 동작 구조를 만들어 냈는데 이를 통해 기존의 기술에 비해 더 높은 확장성을 가지며 안정적인 드릴링이 가능하도록 하였습니다.
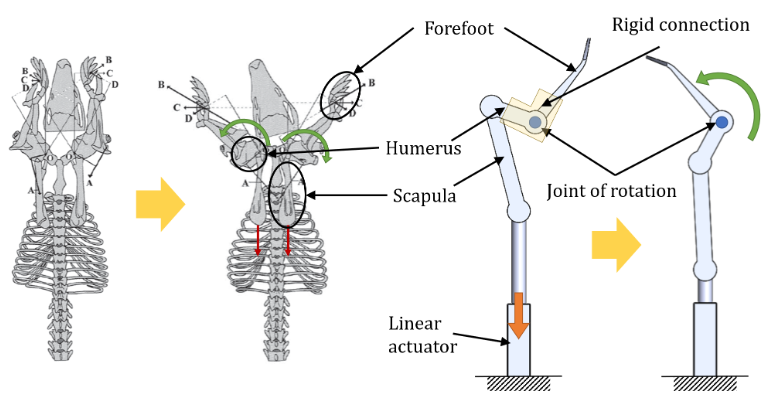
또한, 잔해제거부에서는 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨 구조를 묘사해 크고 강력한 발을 이용해서 땅을 파내며 나오는 잔해를 제거하는 구조로 설계하였으며, 허리부에서는 두더지의 허리 부분을 묘사한 구조를 통해 360˚로 자유로운 방향 전환이 가능할 수 있도록 하였습니다.
몰봇의 가장 큰 특징은 앞 몸체와 뒷 몸체가 각각 굴착과 이동 및 고정 역할을 수행하도록 따로 구성되어 있다는 점이며, 이들의 사이는 선형 구동기로 연결되고 피스톤의 왕복운동을 통해 자유롭게 좌우 회전이 가능하다고 합니다.

마지막으로 동체를 움직이는 이동부는 동일한 3개의 궤도 유닛을 120˚ 간격으로 균등하게 배치하여 예측이 불가능한 땅 속 깊은 곳에서도 안정적인 지지 및 이동을 할 수 있도록 했습니다.
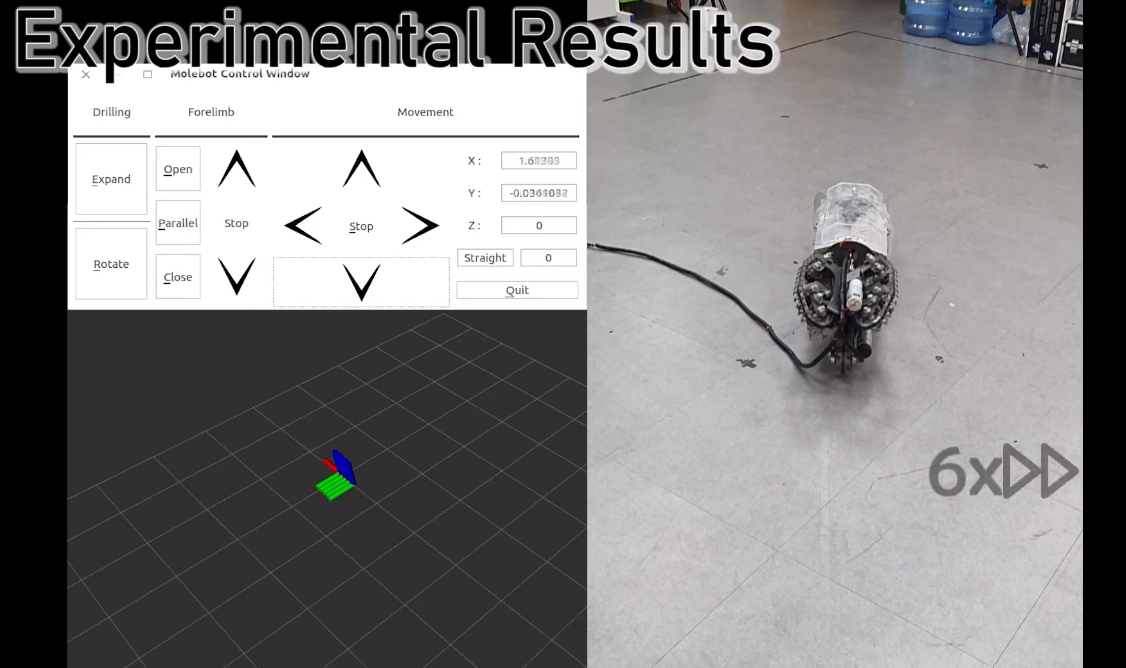
| 땅속에 들어간 로봇을 어떻게 조종할 수 있을까요? |
몰봇을 동작시키기 위해선 통신이 필요합니다. 하지만 지하 깊숙한 곳으로 내려갈수록 전파가 거의 터지지 않아 통신이 불가능합니다. 그렇다면 통신이 힘든 땅속 깊은 곳에서는 어떻게 조작이 가능할까요?

몰봇을 제작한 연구팀은 지하 환경은 대부분 주변이 암석과 흙으로 이루어져 있어 무선 통신 신호를 활용하기 어렵고 내부가 협소하기 때문에 일반적으로 사용하는 비전 센서 및 레이저 센서를 사용하기 어려웠다고 합니다.
그래서 이를 해결하기 위해 자기장 센서가 포함된 관성항법 센서를 탑재하여 지구 자기장 시계열 데이터를 매칭 시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 새롭게 자체적으로 개발했는데 이를 통해 지구 자기장 데이터의 변화를 측정하여 로봇의 위치를 확인하여 지하 공간에서도 3차원적인 자율주행이 가능하도록 제작했다고 합니다.
| 생체 모방형 로봇이란 무엇이고 실제로 어떻게 활용되고 있을까요? |
생체 모방형 로봇이란 인간, 동물, 곤충, 새, 물고기 등과 같은 생명체가 지니고 있는 고유하고 우수한 특성을 창조적으로 모방한 로봇을 말합니다. 지금 알아보고 있는 ‘몰봇’ 역시 두더지의 우수한 굴착 능력과 구조를 모방한 로봇입니다.
그럼 생체모방형 로봇은 우리의 생활에서 어떻게 이용되고 있을까요?

국내 최초의 휴머노이드 로봇 ‘휴보’
2004년 한국과학기술원 오준호 교수팀이 세계에서 2번째로 개발에 설공한 인간형 로봇 휴보는 휴머노이드와 로봇의 합성어로, 지난 2015년에는 세계 재난 로봇대회에서 우승을 차지하기도 했습니다. 휴보는 스스로 차를 운전해 사고 현장에 도착하여 차에서 내리고 문을 열고 들어가고 장애물을 스스로 인지하며 통과하고 계단을 오르는 등의 임무를 정해진 시간 내에 완벽히 수행해 재난 구조용으로도 사용이 가능하다고 합니다. 또한 최근에는 대전의 지역 방송에 뉴스 앵커로 등장하여 약 5분 동안 언택트 사회 속의 바리스타 로봇, 서빙 로봇 등의 국내 로봇 연구 및 개발 현장 등을 소개하기도 했습니다.

구조용 뱀 로봇 ‘스코프’
액티브스코프카메라(Active Scope Camera)는 일본 도호쿠대학 로봇팀에서 제작한 뱀 구조로봇으로 2011년 3월 일본 동북부 지역을 강타한 강진과 쓰나미로 도시가 파괴되고 엄청난 인명피해가 난 현장에 투입되어 사람이 직접 수색하기 어려운 지역에 투입되어 잔해더미 속을 파헤치며 숨겨진 생존자를 찾는 일을 수행했습니다. ‘스코프’라고도 불리는 이 로봇은 사람이 접근할 수 없는 좁은 공간을 82cm/s의 속도로 이동할 수 있고 피해 현장 깊숙이 침투하여 고해상도의 광 카메라로 피해 현장의 영상을 촬영해 전송할 수 있다고 합니다.

두더지의 굴착 능력에서 영감을 받아 탄생한 몰봇, 몰봇은 기존의 복잡했던 지하자원 탐사에 큰 도움을 줄 수 있을 것이며 더 나아가 최근 스페이스X사에서 민간기업 중 최초로 성공해 전세계의 이목이 집중됬던 유인우주선을 타고 우주로 나아가 더 험난한 환경에서도 미지의 행성을 탐사하는데 활용될 수도 있을 것이라 생각합니다. 생체모방기술과 융합되어 자연에서 해답을 찾아 점점 발전하는 로봇공학, 앞으로 이러한 생체 모방형 로봇이 우리의 생활을 어떻게 바꿔나갈지 기대됩니다.
https://blog.naver.com/with_msip/222019722648
지하자원을 탐사하는 두더지 로봇 '몰봇'
우리가 살고 있는 지구의 땅속에는 수많은 지하자원이 있습니다. 하지만 지금껏 유용하게 사용되어온 자원...
blog.naver.com
'과학기술정보통신부 8기 블로그기자단 활동' 카테고리의 다른 글
| [블로그 기사 제출본] Made in KOREA, 한국형 차세대 고속열차 KTX-이음 (1) | 2023.12.29 |
|---|---|
| [블로그 기사 제출본] 국내 최초의 디지털 신분증, 모바일 운전면허증 (0) | 2023.01.19 |
| [블로그 기사 제출본] 분산 컴퓨팅을 활용한 코로나 19 백신 찾기 프로젝트 : 우리집 컴퓨터로 백신 연구에 기여한다면? (0) | 2023.01.18 |
| [블로그 기사 제출본] 학습 데이터가 필요 없는 인공지능 기술, 제로샷 (0) | 2023.01.18 |
| 8기 과학기술정보통신부 블로그기자단 "면접+최종합격후기" (0) | 2020.10.26 |



